Gazebo Simulation#
Jedy環境のsimulation#
以下のコマンドでシミュレーションのGazebo環境を立ち上げる.
$ source /opt/ros/jazzy/setup.bash
$ source ~/ros2_ws/install/setup.bash
$ ros2 launch jedy_bringup jedy_gazebo.launch.py
ロボットが倒れた場合の復帰方法#
Gazeboシミュレーション中に,ロボットが倒れてしまうことがある.特にjedyロボットのような小型ヒューマノイドロボットでは,関節の動作や外力によって転倒することがある.
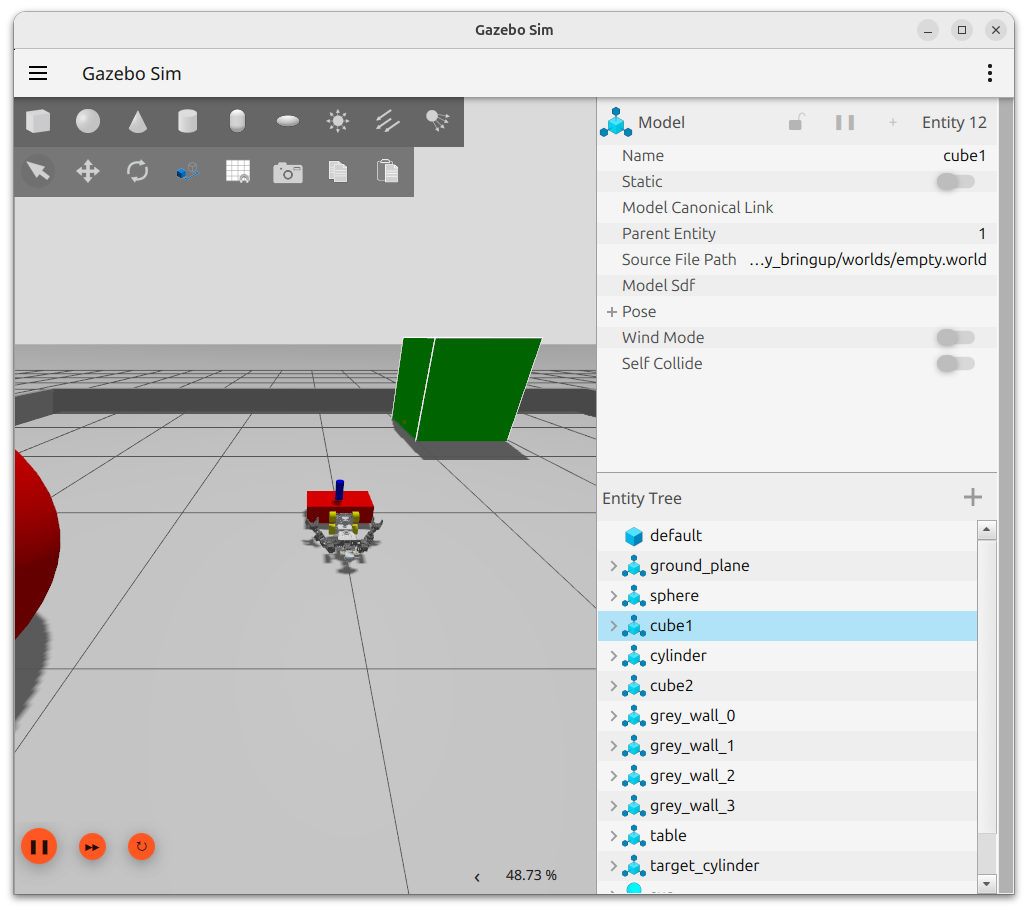
図 117 Gazeboシミュレーション中に倒れてしまったjedyロボット#
このような場合,Gazeboのgz serviceコマンドを使用してロボットの姿勢をリセットすることができる.以下のコマンドを実行すると,ロボットを指定した位置・姿勢に復帰させることができる.
$ source /opt/ros/jazzy/setup.bash
$ gz service -s /world/default/set_pose --reqtype gz.msgs.Pose --reptype gz.msgs.Boolean --req "
name: 'jedy',
position: {x: 0, y: 0, z: 0.2},
orientation: {w: 1, x: 0, y: 0, z: 0}
"
このコマンドは以下のパラメータを指定している:
name: 'jedy':ロボットのモデル名position: {x: 0, y: 0, z: 0.2}:ロボットの位置(単位:メートル).z座標を0.2mに設定することで,地面から少し浮かせた位置に配置するorientation: {w: 1, x: 0, y: 0, z: 0}:ロボットの姿勢(クォータニオン).この値は初期姿勢(直立状態)を表す
コマンド実行後,ロボットは指定した位置・姿勢に復帰する.
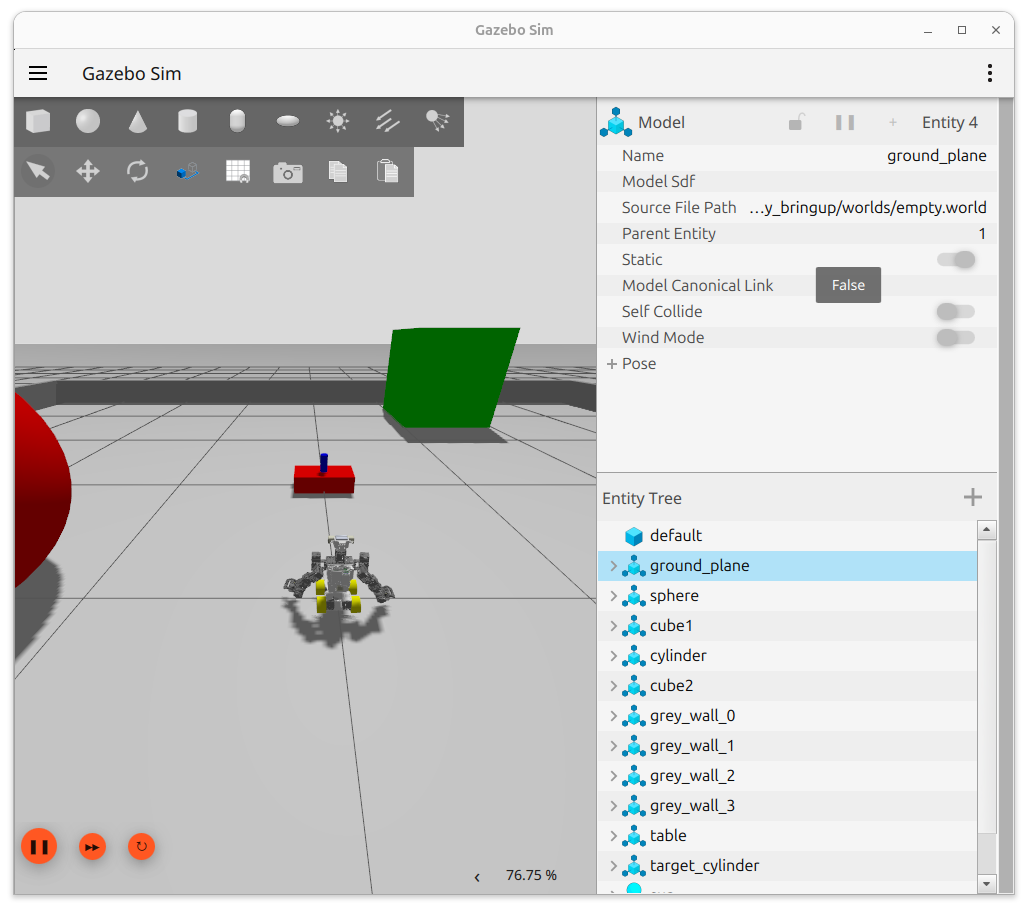
図 118 gz serviceコマンドで復帰したjedyロボット#
Note
ロボット名(nameパラメータ)やz座標の値は,使用するロボットモデルによって適切に調整する必要がある.Gazebo GUI上でEntity Treeを確認することで,ロボットのモデル名を確認できる.