実機の使用方法#
本ページでは,双腕移動台車ロボットJedyの実機を使用する際の基本的な操作方法について説明する.
サーボバッテリーの接続と電源ON#
実機を動かすには,まずサーボ制御基板にバッテリーを接続し,電源をONにする必要がある.
バッテリーの接続手順#
バッテリーの接続:サーボバッテリーの白いVH2ピンコネクタをサーボ制御基板のVH2ピンに接続する
電源ON:ロボット背面にあるサーボ制御基板のスイッチを押すと,青いLEDが点灯し,数秒後にブザー音が鳴る
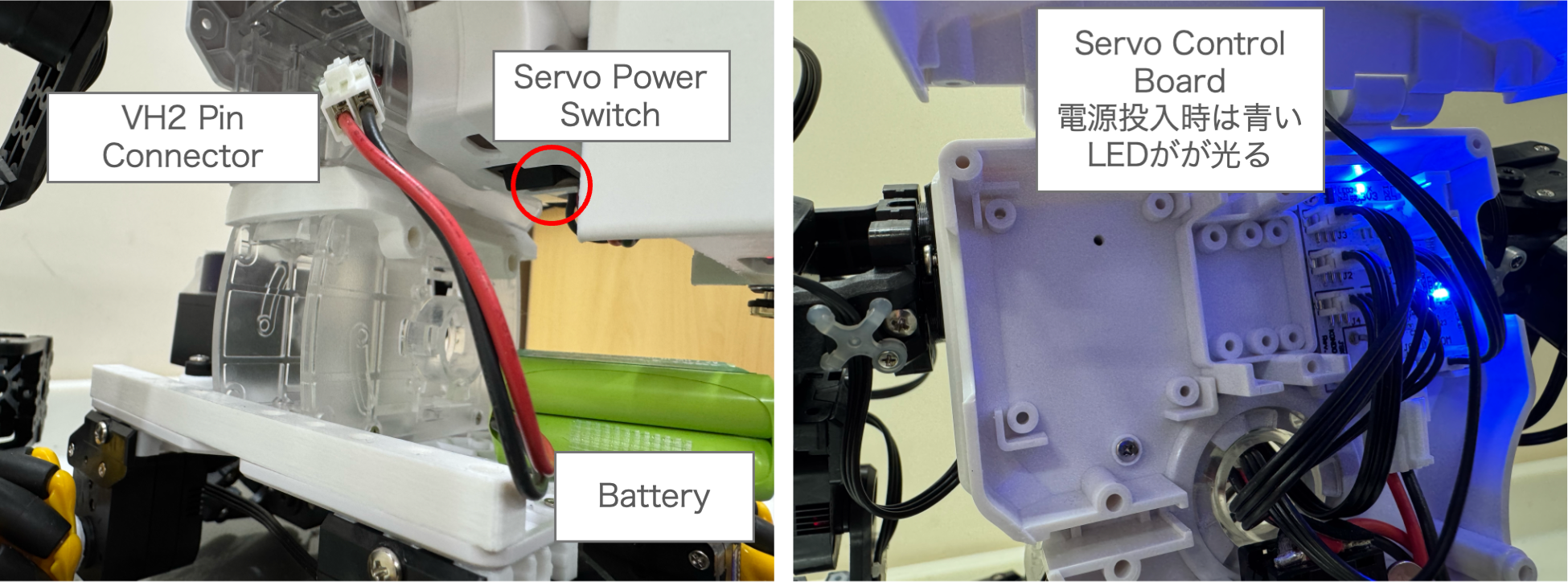
図 99 サーボ制御基板の電源ON方法#
電源ONの確認#
電源が正しくONになると,以下のような状態になる:
青いLEDが点灯する
数秒後にブザー音(ビープ音)が鳴る
サーボモータに電力が供給される
サーボバッテリーの充電方法#
Danger
サーボバッテリーの充電に関する重要な注意事項
サーボバッテリーを充電する際は,必ず専用のACアダプタとUSBケーブルを使用すること.
絶対にPCのUSBポートには接続しないこと!
PCに接続すると,PCやバッテリーが破損する可能性がある.
正しい充電手順#
専用ACアダプタの使用:配布された専用のACアダプタをコンセントに接続する
USBケーブルの接続:専用のUSBケーブルでACアダプタとバッテリーを接続する
充電状態の確認:バッテリーのLEDインジケータで充電状態を確認する
LED点滅:待機中または充電できないバッテリー
LED点灯:充電中
LED消灯:充電完了
LED高速点滅:エラー
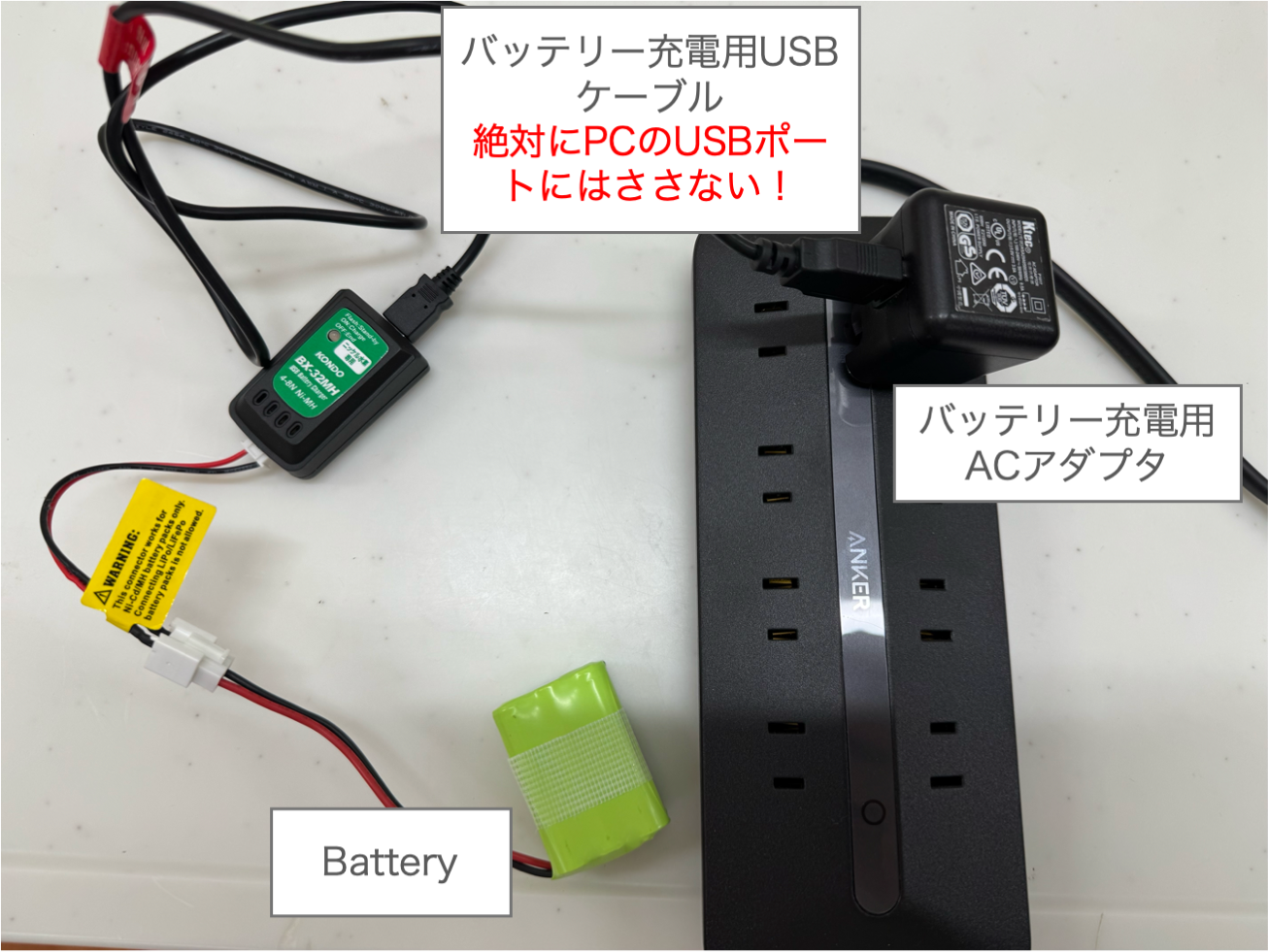
図 100 サーボバッテリーの正しい充電方法(専用ACアダプタを使用)#
See also
充電器の詳細な仕様や使用方法については,BX-32MH充電器マニュアル(PDF)を参照のこと.