usb_camによる簡易人体モーションキャプチャ#
操縦者の身体姿勢とヒューマノイドロボットをリアルタイム同期し, 自身の体のようにヒューマノイドロボットを操縦する技術は, アバター,マスタ・スレーブ,テレブレゼンス,テレイグジステンス,義体,などのキーワードで取り上げられる. 本来であれば,人体姿勢の3D計測が可能な手法(光学式モーションキャプチャ,装着型スーツ(IMU/変位センサ),PointCloudデバイス(Kinect, Xtion), VRコントローラ) 等を利用することが多い. 2D単眼カメラ画像のみしか利用できない場合,機械学習的手法(OpenPose: CMU-Perceptual-Computing-Lab/openpose)などを用いて, 3次元の人体骨格姿勢を推定することになるが,計算量を要するため本演習では扱わない.
本演習では,これまでに触れてきた各種2D画像処理技術
HSV色抽出
顔検出
チェッカーボード検出
円・楕円・幾何形状フィッティング
クラスタリング
特徴点マッチング
などの,OpenCV,ひいてはROSに実装されているツール群と, 演習用PCのインカメラを組み合わせた,簡易的なモーションキャプチャを実装する.
以降はROSのusb_cam_nodeが演習PCのインカメラを排他的に利用するため, オンラインで演習を行っている場合は ZoomやGoogle Meetのカメラは無効にしなければならないことに注意する.
以下のサンプルプログラムを起動してみる.
$ roslaunch cart_humanoid sample_head_arm_skin_detect.launch
sample_head_arm_skin_detect.launchの中では, 以下のように,
usb_camによるインカムからの2D画像取得
hsv_color_filterによる肌色検出+マスク画像生成
general_contoursの楕円フィッティング機能による主要エリア検出(≒クラスタリング)
skin_ellipse_area_to_ik_tgt.pyによる2D画像内位置→3D目標位置への変換
を実行できるノードを起動している.
<node pkg="usb_cam" type="usb_cam_node" name="usb_cam">
<param name="framerate" value="10"/>
<param name="pixel_format" value="yuyv"/>
</node>
<group ns="head_arm">
<!-- detect skin color (sample)-->
<include file="$(find opencv_apps)/launch/hsv_color_filter.launch">
<arg name="image" value="/usb_cam/image_raw"/>
<arg name="debug_view" value="$(arg debug_view)"/>
<arg name="h_limit_max" default="50"/>
<arg name="h_limit_min" default="0"/>
<arg name="s_limit_max" default="255"/>
<arg name="s_limit_min" default="50"/>
<arg name="v_limit_max" default="150"/>
<arg name="v_limit_min" default="50"/>
</include>
<!-- publish ellipse fitting for head larm rarm area -->
<include file="$(find opencv_apps)/launch/general_contours.launch">
<arg name="image" value="hsv_color_filter/image"/>
<arg name="debug_view" value="$(arg debug_view)"/>
</include>
</group>
<!-- simple labeling on top 3 area -->
<node pkg="cart_humanoid" type="skin_ellipse_area_to_ik_tgt.py" name="skin_ellipse_area_to_ik_tgt"
output="screen"/>
general_contoursによって肌領域を楕円フィッティングした結果がpublishされるが, larm, rarm, head や,その他のノイズ領域の区別がつかないため, skin_ellipse_area_to_ik_tgt.py内部では以下のように面積の大きい順や,左右方向の位置によってソートする処理などが入っている.
※煩雑なので参考程度で良いが,自分で改良する場合はよく考えて理解して欲しい
unsorted_list = [ (rs.size.width * rs.size.height, rs.center.x, rs.center.y) for rs in msg.rects]
top3_area_list = sorted([(area, x, y) for (area, x, y) in unsorted_list], reverse=True)[:3]
pos_sorted_list = sorted([(x, y, area) for (area, x, y) in top3_area_list])
# # sorted by X pos in image coords, and simple labeling
# # left-most ellipse in the image = right hand
# # middle ellipse in the image = face
# # right-most ellipse in the image = left hand
valid_area_min = 10000
if len([area for (x, y, area) in pos_sorted_list if area > valid_area_min]) < 3:
rospy.logwarn_throttle(1, "valid skin area < 3, keep waiting...")
return
else:
rarm_pos = pos_sorted_list[0]
head_pos = pos_sorted_list[1]
larm_pos = pos_sorted_list[2]
また,2D→3Dへの変換はX(前)方向に定数(CONST_DEPTH)を仮定する簡易的なもので roslaunch起動時に”const_depth:=0.3”のように指定できるので適宜変更して良い.
# 2D image coords [0~640, 0~480] -> 3D robot coords [CONST_DEPTH, -0.5~0.5, 0~1]
IMAGE_W = 640.0 # [pixel]
IMAGE_H = 480.0 # [pixel]
CONST_DEPTH = self.const_depth # CONST_DEPTH for 2D -> 3D
val = PoseStamped()
val.pose.orientation.w = 1.0
val.header.frame_id = self.frame_id
val.pose.position.x = CONST_DEPTH
val.pose.position.y = (head_pos[0] - (IMAGE_W/2)) / (IMAGE_W/2) * 0.5
val.pose.position.z = -(head_pos[1] - (IMAGE_H/2)) / (IMAGE_H/2) * 0.5 + 0.5
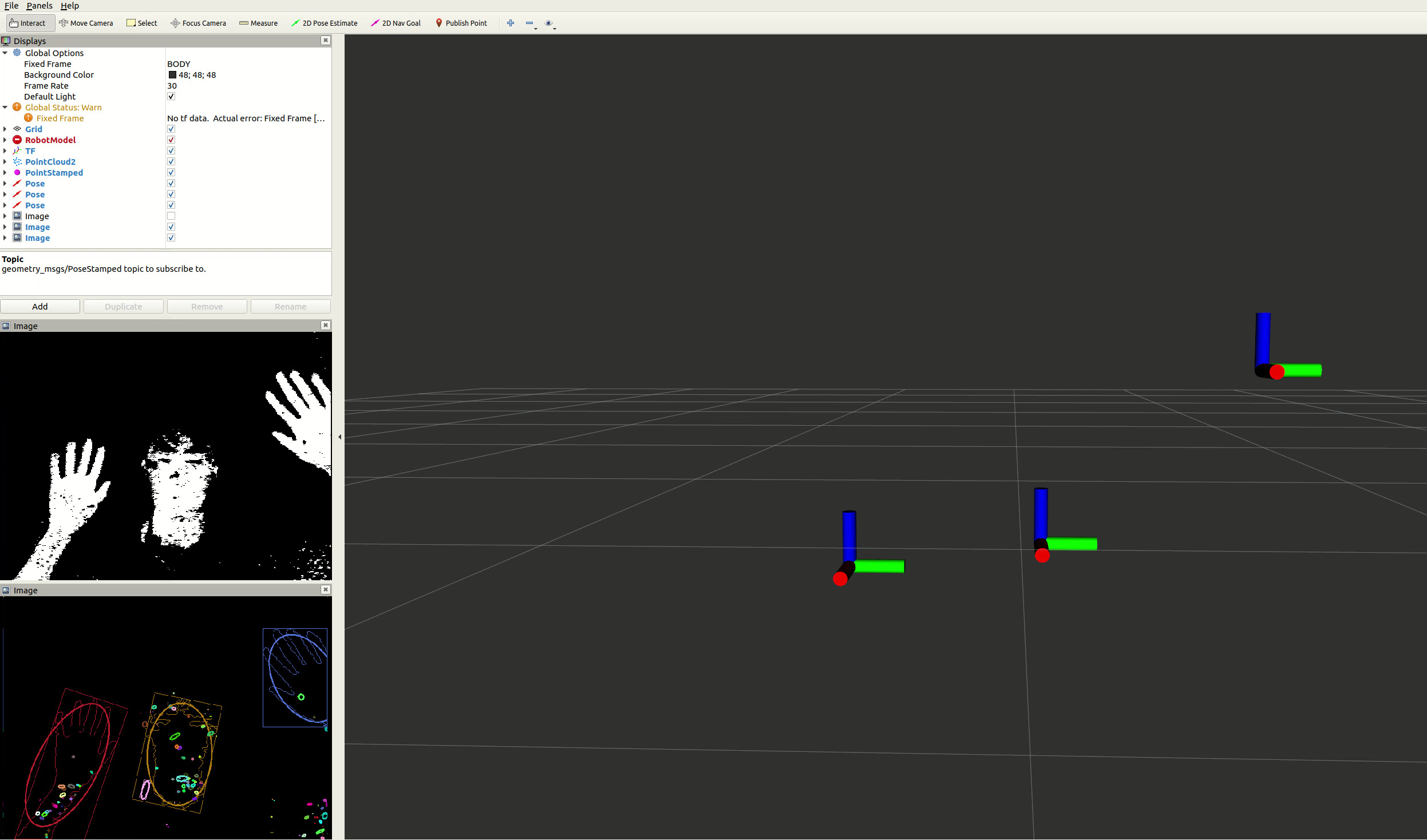
hsv_color_filterの現在のパラメータ設定は肌の色や環境の明るさに依存するので, 個々人の環境で正常に動作するようにチューニングしてみよう(→課題).
正しくチューニングされると,のように, 両手と顔に大きな楕円領域がフィッティングされ,かつその領域が3D空間上にgeometry_msgs::PoseStamoed型のTopic(/ik_*_tgt)として表示されるようになる.
ここまでで,usb_camから人間の上肢のエンドエフェクタ姿勢をgeometry_msgs::PoseStamoed型のTopic(/ik_*_tgt)でpublishするlaunchファイルと, それらを受け取って全身のIKを実行し目標関節角を実ロボットに送信するノード, 目標関節角を受け取って動作するシミュレーション環境が揃っているので, 同時起動してみよう.
$ roslaunch cart_humanoid cart_humanoid_gazebo.launch
$ rosrun cart_humanoid realtime-ik-sample.l
$ roslaunch cart_humanoid sample_head_arm_skin_detect.launch