経路計画#
前章では,地図情報が未知な状況から, センサ値に基づきロボットが地図作成と 自己位置同定を行うサンプル実行法を紹介した. 本章では,前章の/tmp/my_mapのように すでにある地図をロボットが活用する方法, およびその中で経路計画する方法について説明する. なお,初期設定の台車移動速度は かなり早いため,本章冒頭のロボットPCの固定は しっかりしておく. またアームが視野内に移らないように上げておき,移動時には ロボット・ロボットPCから外側に伸びている ケーブルをすべて外しておく(電源のACアダプタなど)
一度それまで起動したlaunchを落とした後jedy_bringup.launch.pyを起動した状態で,
$ roslaunch turtlebot_navigation amcl_demo.launch map_file:=/tmp/my_map.yaml
$ roslaunch turtlebot_rviz_launchers view_navigation.launch
をそれぞれ別のターミナルで起動する.
まず,自己位置同定について説明する. view_navigation.launch実行時に立ち上がるrvizには, 先ほど作成したMapが既に表示されていると思う. 中では,amcl_demo.launchの中で map_serverというノードが/tmp/my_map.yamlを読み込み, それに応じて/mapというtopicをpublishしている. これにより,他のROSのノードたちが元々ファイルにかかれていた 地図情報を利用できるようになっている. また,rvizには現在の位置にturtlebotが表示されていると思う. これは,amcl_demo.launchの中でamcl (Adaptive Monte Carlo Localization) という自己位置同定を行うROSノードが立ち上がり, 自己位置同定結果をpublishしているためである. amclは,camera_nodelet_managerからscanというtopic (Laserの代わりにkinectを用いたスキャン情報)を受け取り, 自己位置同定を行い, 結果を/amcl_poseや/particlecloudとして出力している.
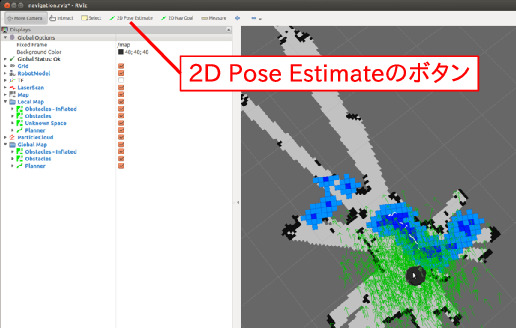
さらに,自己位置同定のamclについてもう少し説明する. rviz上で次の手順を試してもらいたい. (1) 「2D Pose Estimate」というボタンを押す (). (2) 地図上のロボットが(実際に)いる場所にカーソルを合わせる (3) マウス左ボタンをおすと緑矢印がでてくる. (4) マウス左ボタンを押したままカーソルを移動させると 矢印の姿勢が変えられる. (5) 緑矢印の位置=現在位置,矢印の姿勢=現在姿勢 として,amclの/initialposeという 初期推定位置に関するtopicがセットされる. (6) amclノードが/initialposeを初期値とし 自己位置同定を行い, 緑の矢印群 (particlecloud)がrviz上にでてくる. (7) 緑の矢印群は推定中の候補群であり, 時間がたつに連れ,また近傍の情報が更新されるにつれ, どこかに収束していく. 概ね,地図上の実際ロボットがいる 位置姿勢に収束していくのが見て取れるとおもう. もし緑矢印がなかなか収束しないようであれば, キーボードもしくはジョイスティック操縦で turtlebotを左右旋回・前後移動させてみよう.
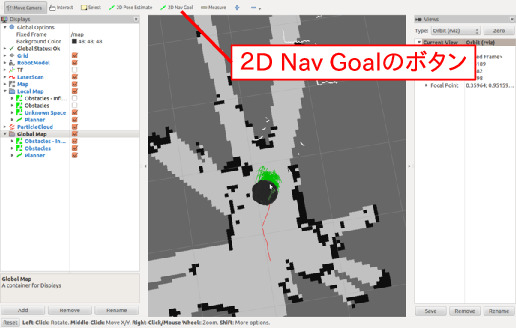
赤線が計画結果
緑の矢印群が自己位置同定の結果(particlecloudというtopic)
次に経路計画について説明する. move_baseというROSノードが /move_base_simple/goalというtopicを 目標到達位置姿勢を受け取り,経路計画を行う. サンプル実行方法は,先ほどのrvizの上で (1) 「2D Nav Goal」というボタンを押す (). (2) 地図上の到達させたいゴール地点にマウスを合わせる. (3) マウス左ボタンをおすと緑矢印がでてくる. (4) マウス左ボタンを押したままカーソルを移動させると 矢印の姿勢が変えられる. (5) 緑矢印の位置=目標位置,矢印の姿勢=目標姿勢として, /move_base_simple/goalのゴールがセットされる. (6) move_baseノードが経路計画を行い, 計画した経路にそうように /cmd_vel_mux/input/navi_rawという 台車速度目標指令値が送られる. なお,この指令値は キーボード・ジョイスティックおよび EusLispの:go-velocityメソッドと同様の 台車速度指令値を送っていることになる.
途中amcl.launchの出力で
[ WARN] [1447760799.636129036]: Could not get robot pose, cancelling reconfiguration
のようなエラー,ワーニングがでてきた場合は,amcl.launchをCtrl-cして再 度起動しなおす